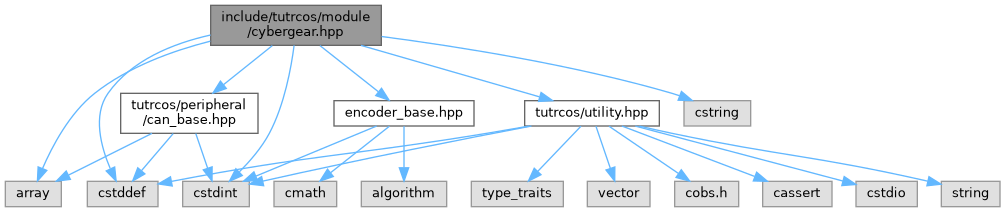
#include <array>#include <cstddef>#include <cstdint>#include <cstring>#include "tutrcos/peripheral/can_base.hpp"#include "tutrcos/utility.hpp"#include "encoder_base.hpp"
cybergear.hpp の依存先関係図:
クラス | |
| class | tutrcos::module::Cybergear |
| struct | tutrcos::module::Cybergear::MotorStatus |
| struct | tutrcos::module::Cybergear::MotorFault |
| struct | tutrcos::module::Cybergear::MotorParameter |
名前空間 | |
| namespace | tutrcos |
| namespace | tutrcos::module |
マクロ定義 | |
| #define | CMD_POSITION 1 |
| #define | CMD_RESPONSE 2 |
| #define | CMD_ENABLE 3 |
| #define | CMD_RESET 4 |
| #define | CMD_SET_MECH_POSITION_TO_ZERO 6 |
| #define | CMD_CHANGE_CAN_ID 7 |
| #define | CMD_RAM_READ 17 |
| #define | CMD_RAM_WRITE 18 |
| #define | CMD_GET_MOTOR_FAIL 21 |
| #define | ADDR_RUN_MODE 0x7005 |
| #define | ADDR_IQ_REF 0x7006 |
| #define | ADDR_SPEED_REF 0x700A |
| #define | ADDR_LIMIT_TORQUE 0x700B |
| #define | ADDR_CURRENT_KP 0x7010 |
| #define | ADDR_CURRENT_KI 0x7011 |
| #define | ADDR_CURRENT_FILTER_GAIN 0x7014 |
| #define | ADDR_LOC_REF 0x7016 |
| #define | ADDR_LIMIT_SPEED 0x7017 |
| #define | ADDR_LIMIT_CURRENT 0x7018 |
| #define | ADDR_MECH_POS 0x7019 |
| #define | ADDR_IQF 0x701A |
| #define | ADDR_MECH_VEL 0x701B |
| #define | ADDR_VBUS 0x701C |
| #define | ADDR_ROTATION 0x701D |
| #define | ADDR_LOC_KP 0x701E |
| #define | ADDR_SPD_KP 0x701F |
| #define | ADDR_SPD_KI 0x7020 |
| #define | POS_MIN -12.5f |
| #define | POS_MAX 12.5f |
| #define | VEL_MIN -30.0f |
| #define | VEL_MAX 30.0f |
| #define | CUR_MIN -27.0f |
| #define | CUR_MAX 27.0f |
| #define | TOR_MIN -12.0f |
| #define | TOR_MAX 12.0f |
| #define | CURRENT_FILTER_GAIN_MIN 0.0f |
| #define | CURRENT_FILTER_GAIN_MAX 1.0f |
| #define | CUR_KP_MAX 200.0f |
| #define | CUR_KP_MIN 0.0f |
| #define | CUR_KI_MAX 200.0f |
| #define | CUR_KI_MIN 0.0f |
| #define | P_MIN -12.5f |
| #define | P_MAX 12.5f |
| #define | V_MIN -30.0f |
| #define | V_MAX 30.0f |
| #define | KP_MIN 0.0f |
| #define | KP_MAX 500.0f |
| #define | KD_MIN 0.0f |
| #define | KD_MAX 5.0f |
| #define | T_MIN -12.0f |
| #define | T_MAX 12.0f |
| #define | IQ_MIN -27.0f |
| #define | IQ_MAX 27.0f |
| #define | CURRENT_FILTER_GAIN_MIN 0.0f |
| #define | CURRENT_FILTER_GAIN_MAX 1.0f |
| #define | DEFAULT_CURRENT_KP 0.125f |
| #define | DEFAULT_CURRENT_KI 0.0158f |
| #define | DEFAULT_CURRENT_FINTER_GAIN 0.1f |
| #define | DEFAULT_POSITION_KP 30.0f |
| #define | DEFAULT_VELOCITY_KP 2.0f |
| #define | DEFAULT_VELOCITY_KI 0.002f |
| #define | DEFAULT_VELOCITY_LIMIT 2.0f |
| #define | DEFAULT_CURRENT_LIMIT 27.0f |
| #define | DEFAULT_TORQUE_LIMIT 12.0f |
| #define | RET_CYBERGEAR_OK 0x00 |
| #define | RET_CYBERGEAR_MSG_NOT_AVAIL 0x01 |
| #define | RET_CYBERGEAR_INVALID_CAN_ID 0x02 |
| #define | RET_CYBERGEAR_INVALID_PACKET 0x03 |
| #define | CW 1 |
| #define | CCW -1 |
マクロ定義詳解
◆ ADDR_CURRENT_FILTER_GAIN
| #define ADDR_CURRENT_FILTER_GAIN 0x7014 |
◆ ADDR_CURRENT_KI
| #define ADDR_CURRENT_KI 0x7011 |
◆ ADDR_CURRENT_KP
| #define ADDR_CURRENT_KP 0x7010 |
◆ ADDR_IQ_REF
| #define ADDR_IQ_REF 0x7006 |
◆ ADDR_IQF
| #define ADDR_IQF 0x701A |
◆ ADDR_LIMIT_CURRENT
| #define ADDR_LIMIT_CURRENT 0x7018 |
◆ ADDR_LIMIT_SPEED
| #define ADDR_LIMIT_SPEED 0x7017 |
◆ ADDR_LIMIT_TORQUE
| #define ADDR_LIMIT_TORQUE 0x700B |
◆ ADDR_LOC_KP
| #define ADDR_LOC_KP 0x701E |
◆ ADDR_LOC_REF
| #define ADDR_LOC_REF 0x7016 |
◆ ADDR_MECH_POS
| #define ADDR_MECH_POS 0x7019 |
◆ ADDR_MECH_VEL
| #define ADDR_MECH_VEL 0x701B |
◆ ADDR_ROTATION
| #define ADDR_ROTATION 0x701D |
◆ ADDR_RUN_MODE
| #define ADDR_RUN_MODE 0x7005 |
◆ ADDR_SPD_KI
| #define ADDR_SPD_KI 0x7020 |
◆ ADDR_SPD_KP
| #define ADDR_SPD_KP 0x701F |
◆ ADDR_SPEED_REF
| #define ADDR_SPEED_REF 0x700A |
◆ ADDR_VBUS
| #define ADDR_VBUS 0x701C |
◆ CCW
| #define CCW -1 |
◆ CMD_CHANGE_CAN_ID
| #define CMD_CHANGE_CAN_ID 7 |
◆ CMD_ENABLE
| #define CMD_ENABLE 3 |
◆ CMD_GET_MOTOR_FAIL
| #define CMD_GET_MOTOR_FAIL 21 |
◆ CMD_POSITION
| #define CMD_POSITION 1 |
◆ CMD_RAM_READ
| #define CMD_RAM_READ 17 |
◆ CMD_RAM_WRITE
| #define CMD_RAM_WRITE 18 |
◆ CMD_RESET
| #define CMD_RESET 4 |
◆ CMD_RESPONSE
| #define CMD_RESPONSE 2 |
◆ CMD_SET_MECH_POSITION_TO_ZERO
| #define CMD_SET_MECH_POSITION_TO_ZERO 6 |
◆ CUR_KI_MAX
| #define CUR_KI_MAX 200.0f |
◆ CUR_KI_MIN
| #define CUR_KI_MIN 0.0f |
◆ CUR_KP_MAX
| #define CUR_KP_MAX 200.0f |
◆ CUR_KP_MIN
| #define CUR_KP_MIN 0.0f |
◆ CUR_MAX
| #define CUR_MAX 27.0f |
◆ CUR_MIN
| #define CUR_MIN -27.0f |
◆ CURRENT_FILTER_GAIN_MAX [1/2]
| #define CURRENT_FILTER_GAIN_MAX 1.0f |
◆ CURRENT_FILTER_GAIN_MAX [2/2]
| #define CURRENT_FILTER_GAIN_MAX 1.0f |
◆ CURRENT_FILTER_GAIN_MIN [1/2]
| #define CURRENT_FILTER_GAIN_MIN 0.0f |
◆ CURRENT_FILTER_GAIN_MIN [2/2]
| #define CURRENT_FILTER_GAIN_MIN 0.0f |
◆ CW
| #define CW 1 |
◆ DEFAULT_CURRENT_FINTER_GAIN
| #define DEFAULT_CURRENT_FINTER_GAIN 0.1f |
◆ DEFAULT_CURRENT_KI
| #define DEFAULT_CURRENT_KI 0.0158f |
◆ DEFAULT_CURRENT_KP
| #define DEFAULT_CURRENT_KP 0.125f |
◆ DEFAULT_CURRENT_LIMIT
| #define DEFAULT_CURRENT_LIMIT 27.0f |
◆ DEFAULT_POSITION_KP
| #define DEFAULT_POSITION_KP 30.0f |
◆ DEFAULT_TORQUE_LIMIT
| #define DEFAULT_TORQUE_LIMIT 12.0f |
◆ DEFAULT_VELOCITY_KI
| #define DEFAULT_VELOCITY_KI 0.002f |
◆ DEFAULT_VELOCITY_KP
| #define DEFAULT_VELOCITY_KP 2.0f |
◆ DEFAULT_VELOCITY_LIMIT
| #define DEFAULT_VELOCITY_LIMIT 2.0f |
◆ IQ_MAX
| #define IQ_MAX 27.0f |
◆ IQ_MIN
| #define IQ_MIN -27.0f |
◆ KD_MAX
| #define KD_MAX 5.0f |
◆ KD_MIN
| #define KD_MIN 0.0f |
◆ KP_MAX
| #define KP_MAX 500.0f |
◆ KP_MIN
| #define KP_MIN 0.0f |
◆ P_MAX
| #define P_MAX 12.5f |
◆ P_MIN
| #define P_MIN -12.5f |
◆ POS_MAX
| #define POS_MAX 12.5f |
◆ POS_MIN
| #define POS_MIN -12.5f |
◆ RET_CYBERGEAR_INVALID_CAN_ID
| #define RET_CYBERGEAR_INVALID_CAN_ID 0x02 |
◆ RET_CYBERGEAR_INVALID_PACKET
| #define RET_CYBERGEAR_INVALID_PACKET 0x03 |
◆ RET_CYBERGEAR_MSG_NOT_AVAIL
| #define RET_CYBERGEAR_MSG_NOT_AVAIL 0x01 |
◆ RET_CYBERGEAR_OK
| #define RET_CYBERGEAR_OK 0x00 |
◆ T_MAX
| #define T_MAX 12.0f |
◆ T_MIN
| #define T_MIN -12.0f |
◆ TOR_MAX
| #define TOR_MAX 12.0f |
◆ TOR_MIN
| #define TOR_MIN -12.0f |
◆ V_MAX
| #define V_MAX 30.0f |
◆ V_MIN
| #define V_MIN -30.0f |
◆ VEL_MAX
| #define VEL_MAX 30.0f |
◆ VEL_MIN
| #define VEL_MIN -30.0f |
構築: